Flugzeugbau: Hexapod ermöglicht hoch dynamische 6-D-Ausgleichskinematik für Roboter

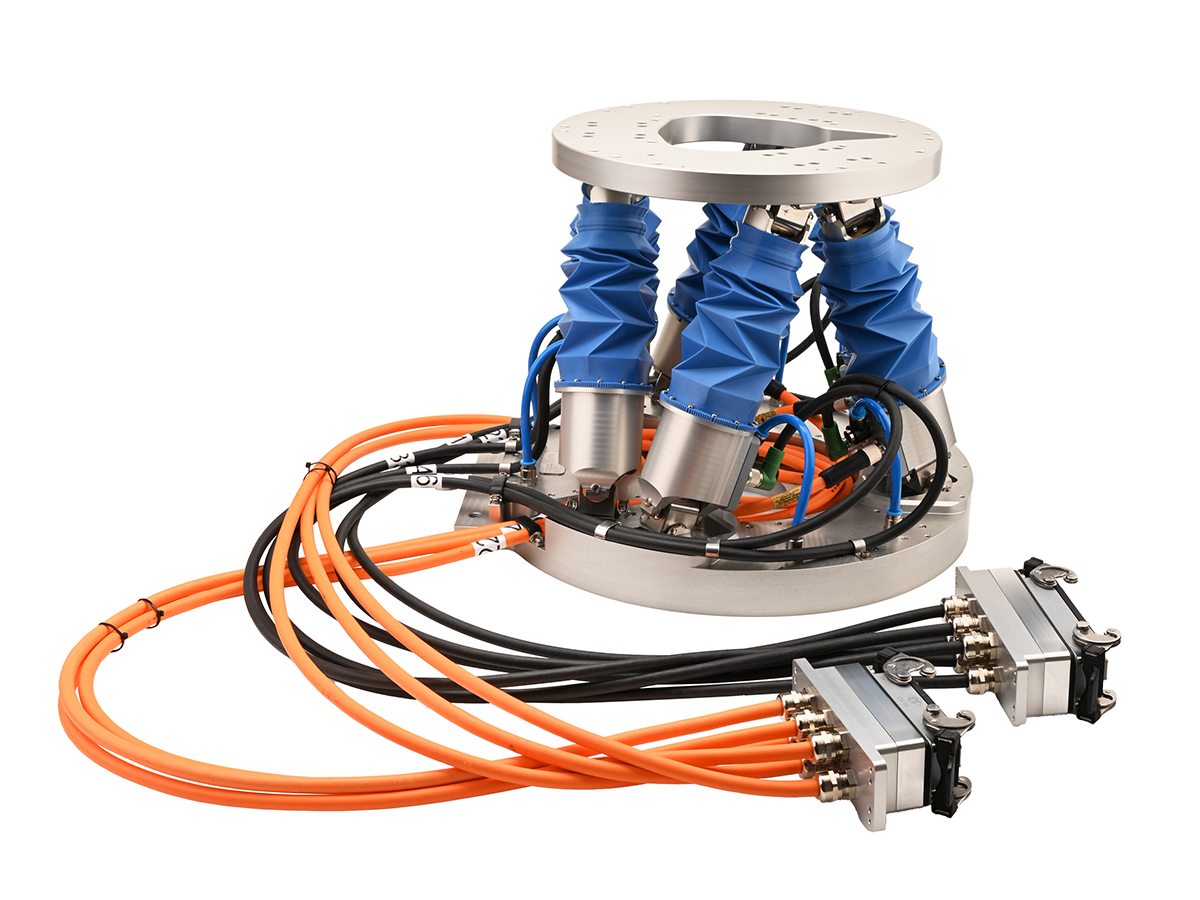
Als Partner des Forschungsprojekts LuFo VI-1: ADMAS (Advanced Machining and Sealing) präsentierten wir im Rahmen der Internationalen Luft- und Raumfahrtausstellung ILA Berlin im Juni ein neu entwickeltes Hexapod-System. Im Rahmen des Verbundvorhabens unter der Leitung von Airbus haben wir ein leistungsfähiges 6-DOF-Hexapod-Bewegungs- und Positioniersystem (Modell H-900K101) für hoch dynamische Ausgleichskinematiken im Flugzeugbau entwickelt. Ziel war es, die Bearbeitungs- und Versiegelungspräzision für CFK-Bauteile im RTM-Herstellungsverfahren (Resin Transfer Molding) zu steigern sowie Produktionszeiten und Prozesskosten zu verringern.
Dynamischer Ausgleich von Prozesskräften
Den Schwerpunkt der Ausgleichskinematik bildet die Konturenbearbeitung von „Wing of Tomorrow“ Singleaisle-Flügelschalen aus CFK mittels Fräsen und Entgraten sowie deren nachgelagerte Versiegelung und das Einbringen von Bohrungen. Kombiniert mit einem Knickarmroboter zur groben Positionierung dient unser Hexapod der Feinpositionierung von Bearbeitungs- und Versiegelungswerkzeugen.
Feinpositionierung von Werkzeugen
Das neuentwickelte Hexapod-System wurde für die spezifischen Rand- und Umgebungsbedingungen der Applikation konzipiert und ist somit insbesondere für die zeitkritischen Fertigungsprozesse mit den vorgegebenen Toleranzen der Luftfahrtindustrie optimiert.
Zusätzlich zu dieser hohen Dynamik bietet das Hexapod-System eine Glasfaserdatenübertragung zwischen Hexapod-Controller und Treiberelektronik. Darüber hinaus zeichnet sich das System durch eine sehr kurze Latenzzeit bei Verwendung einer EtherCAT®-Schnittstelle sowie gemäß Schutzklasse IP54 gedichtete Komponenten aus. Für die EtherCAT®-Schnittstelle wurde eine tiefe Integration der EtherCAT®-Funktionalität in die Controller- und Treiberarchitektur von PI realisiert.
Condition Monitoring
Darüber hinaus wurde im Projekt LuFo VI-1: ADMAS der Einsatz von Beschleunigungssensoren zur Verschleißdetektion bei Einzelbeinen des Hexapods im Rahmen des Condition Monitoring untersucht. Das Frequenzspektrum der Schwingungen innerhalb eines Einzelbeins kann dabei charakteristischen Eigenfrequenzen von Antriebskomponenten zugeordnet werden und somit als Indikator für Systemveränderungen dienen.
Unter Federführung von Airbus haben wir unsere mehr als 30-jährige Expertise aus der Entwicklung von Hexapoden in das Forschungsprojekt eingebracht. Das öffentlich vom Bundesministerium für Wirtschaft und Klimaschutz geförderte und von DLR Projektträger Luftfahrtforschung beaufsichtigte Projekt wurde Ende April 2024 erfolgreich abgeschlossen.
Die Entwicklung bei PI erfolgte unter der Leitung von Dr. Christian Sander, Head of Technology Development Parallel Kinematics, und wurde von David Morof, Technology Engineer / Technology Development Parallel Kinematics, als Systemingenieur betreut. Darüber hinaus wirkten zahlreiche unserer Experten am Erfolg des Projekts mit, darunter Matthias Dörr und Paul Müller (Projektleitung), Siegmar Klein (Systemingenieur zu Projektbeginn), Christian Muellerleile (Firmware- und Elektronikentwicklung sowie Inbetriebnahme), Thomas Stumpf und Kollegen aus dem Musterbau (Aufbau Hexapod), Philipp Argus (PID-Tuning, Dynamikuntersuchungen, Condition Monitoring), Matthias Schulz (Aufbau Treiber und Controller, Verkabelung), Thomas Kropaci und Yannik Dosch (Programmierung EtherCAT- und digitale Schnittstelle) sowie Michael Schröder, Sebastian Riegel und weitere Kollegen aus dem Wertstrom Hexapoden (Abwicklung).
Wir haben mit dem neuen Hexapod H-900K101 ein hoch dynamisches System realisiert, das eine Nutzlast von bis zu 40 kg in der XY-Ebene mit bis zu 12.000 mm/s² beschleunigen kann. Das System ist in der Lage, hochfrequente Bahnabweichungen unter der Einwirkung von Prozesskräften beim Fräsen dynamisch auszugleichen.
Ansprechperson: Dr. Christian Sander, Head of Technology Development Parallel Kinematics